Compositional Trajectory Sampling
Compositional Trajectory Denoising Process.
We train CompDiffuser on the
OGBench
PointMaze Large Stitch Dataset, which only contains short trajectories that travel at most 4 blocks.
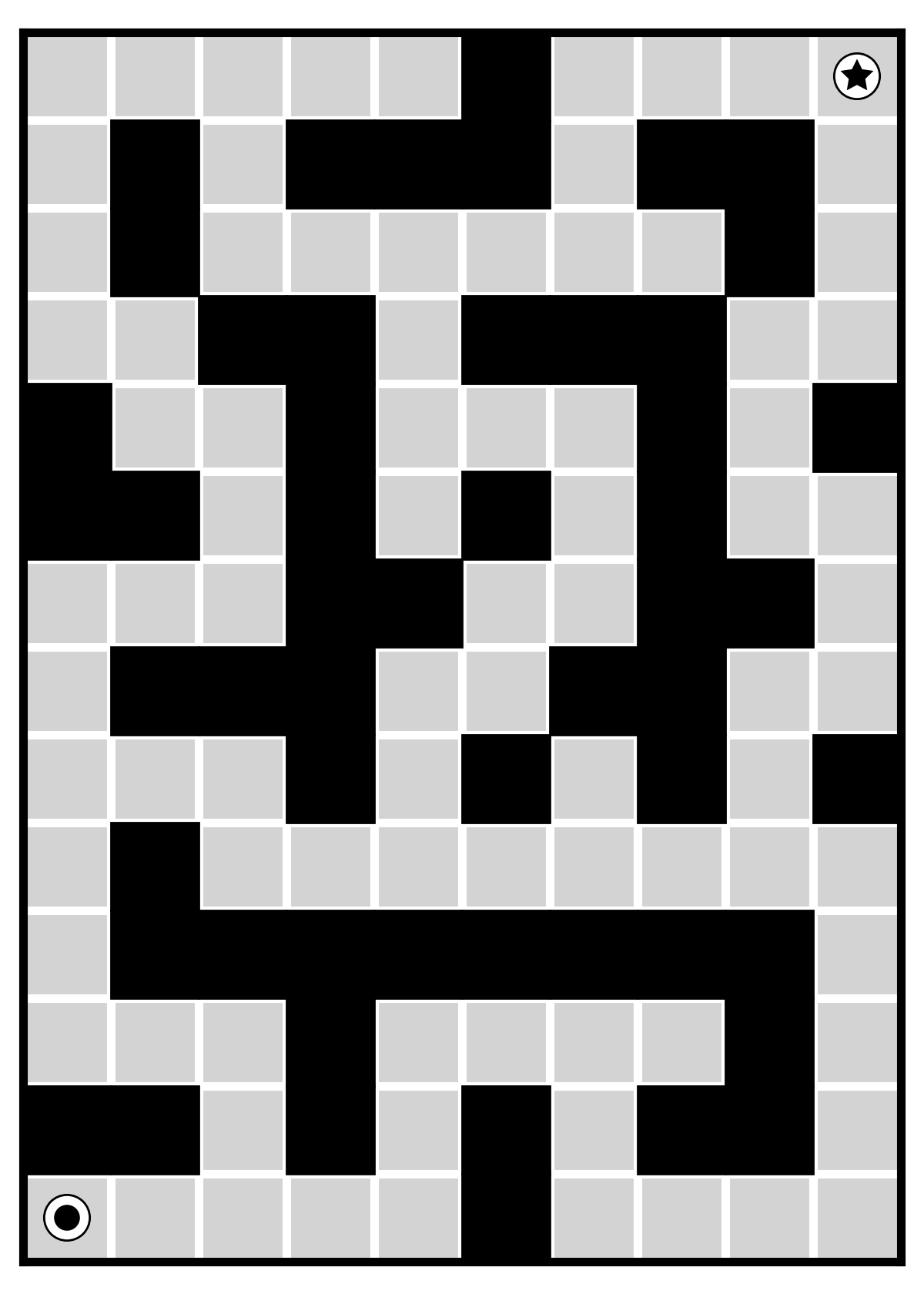
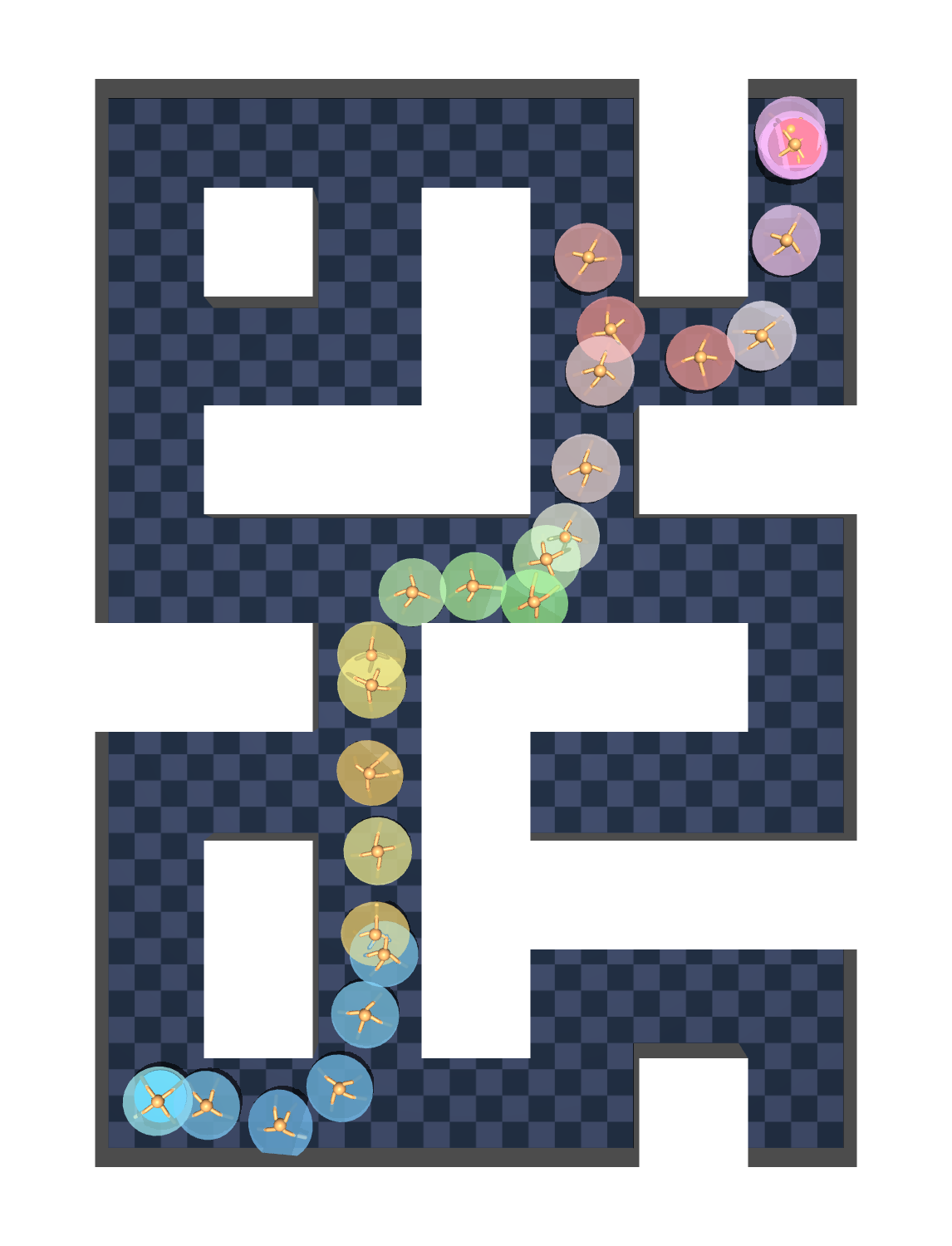
However, at test time, the agent needs to travel up to 15 blocks to reach the given goal
(purple star)
from the given start (blue circle).
The proposed method is able to compositionally sample 5 trajectories, as shown by different colors, to construct a goal-reaching trajectory of much longer horizon than those seen in the training dataset.
 replay
replay
replay